

磁吸附爬壁機器人:使用的匯四方磁吸輪吸附力如何?
發布時間:2024-11-14 14:33:55 來源:匯四方
磁吸式爬壁機器人所配備的專用磁吸輪,其性能備受關注。視頻中測試的磁吸輪直徑為 150mm,參數展示其吸附力在 70 到 75 公斤。為防止劃傷表面,測試中在中間墊了 2mm 厚的 PVC 膠片,此時測得的實際吸附力達 90 至 100 公斤。若去掉這 2mm 厚的膠片,吸力究竟能達到多少?感興趣的朋友可參照參數表,將猜測的答案寫在留言區。
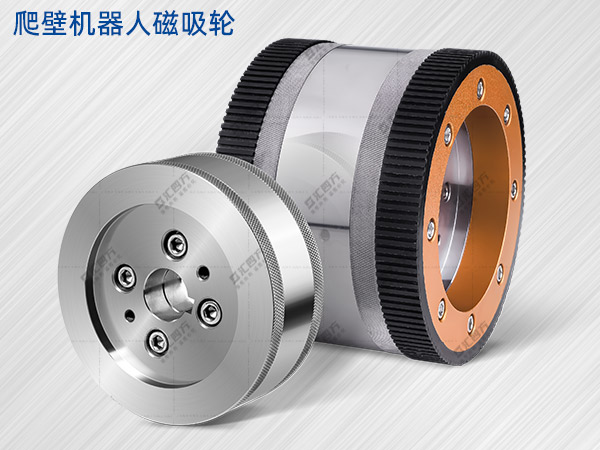
磁吸輪的工作原理基于多個磁鐵的協同作用。這些磁鐵合理分布在輪子周邊,以確保提供均勻的磁吸力,進而產生強大的磁場。這一設計使得機器人在垂直或傾斜的表面移動時,即便處于高危環境,也能始終保持穩定狀態,自由移動。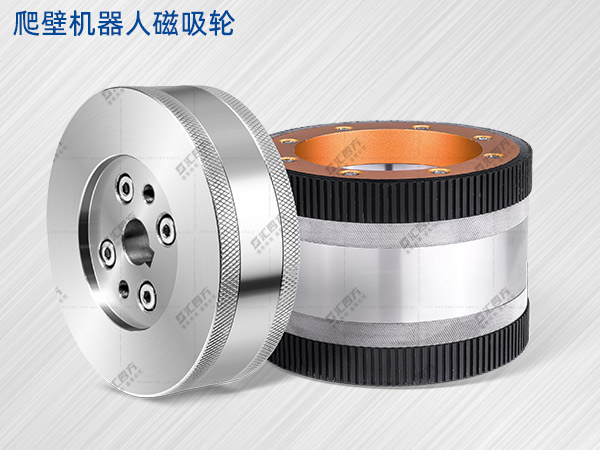
磁吸輪的獨特設計具有重大意義,它徹底改變了傳統的高空作業模式。在石油、化工、電力等行業中,爬壁機器人憑借磁吸輪,能夠順利執行清潔、檢測、維護等一系列任務,極大降低了事故發生的可能性。
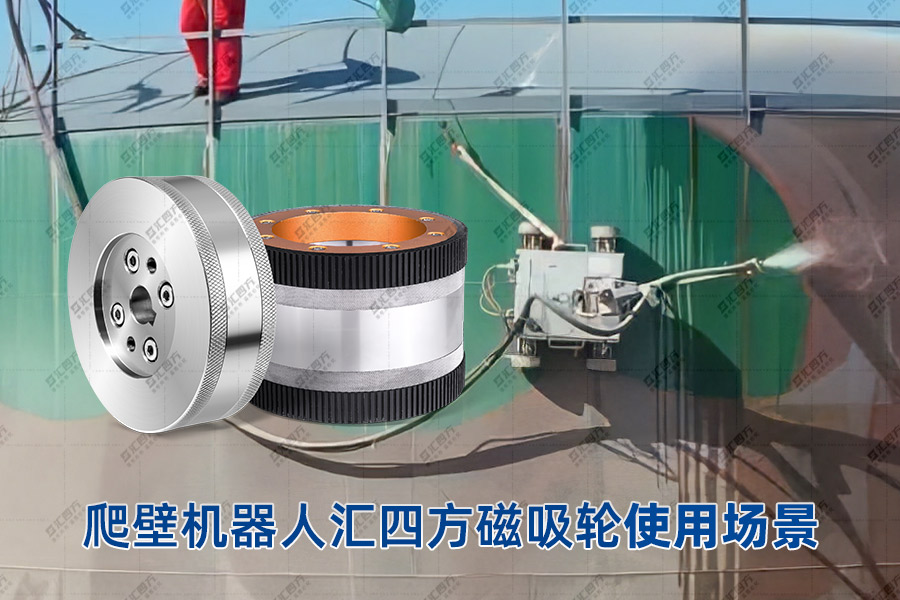
磁吸附爬壁機器人具備眾多優點。其一,無需停產即可直接施工,節省了大量生產成本。其二,施工過程不會產生火花,消除了安全隱患。其三,沒有粉塵污染,符合環保要求。其四,無需搭建腳手架,避免了人身安全隱患。其五,質量穩定且可控。其六,效率高,能夠縮短施工周期。

那么,磁吸輪的應用場景是否僅限于此呢?其實不然,磁吸輪還有可能應用在其他機械設備上。比如,在某些特殊的物料搬運設備中,磁吸輪可以幫助更穩定地吸附和搬運金屬材料。在建筑行業的鋼結構檢測和維護設備中,磁吸輪也能大顯身手,使設備在鋼結構表面靈活移動。此外,在一些特殊的工業檢測設備中,磁吸輪或許也能發揮獨特的作用。未來,隨著技術的不斷進步和創新,磁吸輪的應用領域有望進一步拓展。




